

Infrared imaging features at different time periods
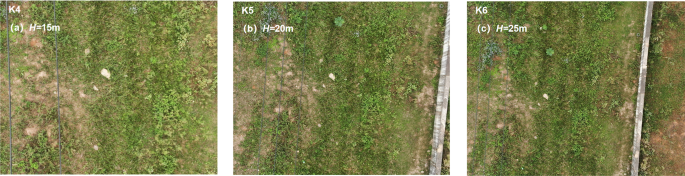
The visible light images of the study area for Case I obtained from different measurement heights are shown in Fig. 2. It can be seen that the study area contains a variety of landforms such as lush vegetation, sparsely vegetated areas, bare sand piles and holes containing water.

Visible light image for Case I.
Figure 3 shows the visible light images of the study area for Case II. As for the Case II, there is no leakage points occurred in the study area, most of which is covered by vegetations. However, the vegetation is extremely unevenly distributed, where some surface is bare and vegetation is not covered.
Visible light image for Case II.
From Figs. 2 and 3, it can be seen that the visible light image can clearly show the difference of hidden danger on the bare slope, but for the vegetation covered area, the visible light image cannot clearly show the hidden leakage point. Figures 4, 5, 6 and 7 show the visible light and infrared thermal radiation images of potential leakage points in the daytime and at night. As for the infrared thermal imaging technology, the infrared images can effectively show the temperature difference and clearly present the difference of hidden danger. However, due to the difference of thermal radiation between the bare land and the vegetation distribution area, there is interference in the detection results, as shown in Fig. 6(a)-6(c). Compared with the infrared images collected at night (see Figs. 4 and 6), it is obvious that the distribution of temperature for case I in the daytime is relatively complicated. Further deep-level image processing and machine learning are required to accurately identify the hidden danger areas and reduce the error. As shown in Fig. 4(a), when the height between the UAV and the surface of the measured area is set as 15 m in the daytime, the bare ground in the study area is in a high-temperature zone, with the highest temperature of 26.2℃, which is higher than the ambient temperature. The waterlogged area and the vegetation area are in the low-temperature zone, and the lowest temperature is located in the vegetation area, which equals to 14.7℃. The lowest temperature in the waterlogged area is 15.3℃.
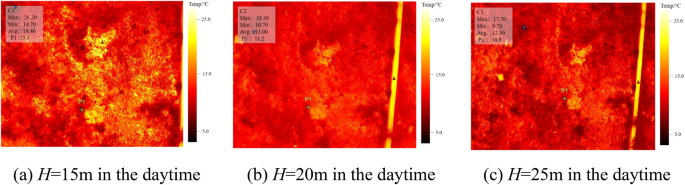
Infrared images for Case IV in the daytime.
As can be seen in Figs. 4 and 5, due to the difference in the distribution of vegetation on the embankment surface, the infrared image information of the normal embankment in the daytime also exists in a variety of temperature zones, and there is the phenomenon of “leakage-like”, which affects the accuracy of the identification of the leakage. For example, very small differences of temperature in Fig. 4(a) and 5(a) are observed in the area of lush vegetation. The temperature is around 14.5℃ in Fig. 4(a), which is slightly lower than the temperature with a value of 15.3 C in the leakage area in Fig. 5(a).
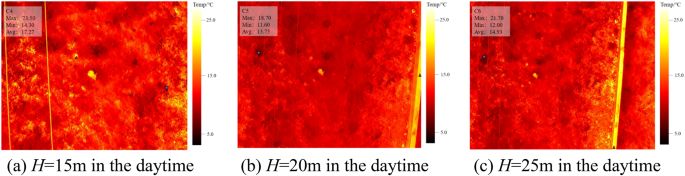
Infrared images for Case V in the daytime.
From Fig. 6, it is obvious that the infrared thermal radiation images at night is more concise compared with that in the daytime. After the overall decrease of the temperature in the no-water body interference area (i.e., the non-hidden area), the influence of vegetation cover on the temperature distribution of embankment slopes decreases significantly. In this case, the hidden seepage area is a high-temperature area (see Fig. 6). The leakage points are more prominent in the whole image compared with that in daytime (see Fig. 4). As shown in Fig. 6(a), when the height between the UAV and the surface of the measured area is set as 15 m at night, the waterlogged area within the typical zone obtained is a significantly high temperature zone, with a maximum temperature of 14.6 °C, which is higher than the ambient temperature but lower than the temperature of the water surface of the river at the same period. As for the other area, except for the extremely low temperature of a few exposed points (8.3 °C), the temperature slightly lower than the ambient temperature. Compared Figs. 6 and 7, it can be seen that under the normal conditions (i.e., without leakage), the infrared image of the embankment at night is uniformly distributed, and the temperature distribution of each region is relatively average with no temperature difference areas. However, when there is a potential seepage, the infrared image shows obvious high temperature area, where the temperature is greatly different from that of the surroundings.

Infrared images for Case IV at night.
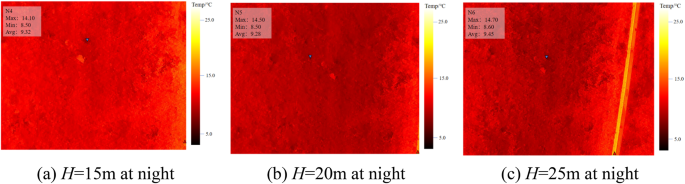
Infrared images for Case V at night.
Table 2 shows the results of identified characteristics of potential leakage points. The leakage area diameter d and original image width L can be used to illustrate the accuracy of seepage leakage detection. d and L are the pixel width obtained from the image. It can be seen that through the visible image, the potential leakage area d/L obtained at the measurement heights of 15 m, 20 m and 25 m are 0.026, 0.020 and 0.018, respectively. By using infrared thermal imaging technology, the values of d/L in the daytime are 0.025, 0.017 and 0.016, respectively, which are obviously smaller than that obtained from visible images. However, the values of d/L at night are 0.029, 0.024 and 0.018, respectively, which are obviously larger than that in the daytime. Comparing the values of d/L of infrared images and visible images at different times of the day at the same altitude, it is obvious that the values of d/L obtained from the infrared images at night have the maximum values. The d/L obtained from the infrared images in the daytime have the minimum values. It shows that the performs better at night in identifying the hidden leakage hazards.
Therefore, compared with the daytime, the infrared image features at night can show the hidden seepage hazards more accurately. Totally, the infrared thermal imaging technology performs better in identifying the hidden leakage hazards in levee projects at night.
Infrared imaging characteristics at different measurement heights
As shown in Figs. 8 and 9 show the images of simulated low temperature leakage point during the day obtained from visible and infrared images, respectively. A rectangular ice pack with a size of 10 cm×16 cm is added in the lower right corner of the study area to simulate the low temperature leakage point during the day. The actual temperature on the surface of the ice pocket during the test is 8℃. Figure 8(a)-8(c) show that the white ice pack is obviously observed in the vegetation area and could be detected in the visible image. However, in the actual leakage situation, the leakage that occurred in the vegetation-covered area is easily obscured by the vegetation and extremely difficult to be captured in the visible image. As the relative altitude between the UAV and the area measured rises, the tiny objects are gradually blurred in the image. Compared with the corresponding infrared image (Fig. 9), it can be seen that when the temperature difference between the leakage area and the non-leakage area is large, the infrared image can show its shape feature and area size. When the relative height between the UAV and the area is increased, although the imaging size of the hidden hazardous area is reduced within the image, its shape feature still can be identified and marked by the thermal imager due to the temperature feature, making more accurate detection.
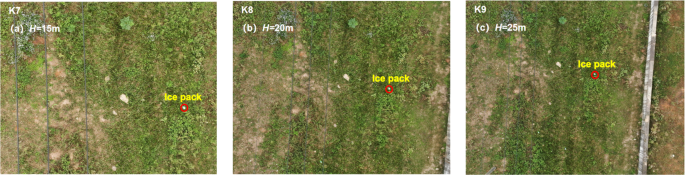
Visible light image for Case III.
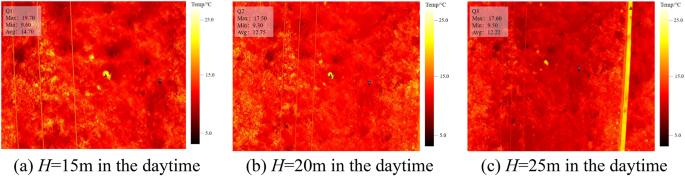
Infrared images for Case VI.
From Fig. 6(a)-6(c), as the measurement height between the UAV and the detected area increases from 15 m to 25 m, the size of the feature area in the image becomes smaller, and the maximum temperature stays around 14.5 °C, higher than the outside ambient temperature. However, the minimum temperature of the area rises, and the average temperature also rises, moving closer to the ambient temperature value. The reason for such changes may be that when the relative height increases, the thermal radiation induction has some degree of attenuation and converges with the ambient temperature. The temperature measurements in images Fig. 4(a)-4(c) show that the attenuation is extremely obvious, and the temperature values are even lower than the ambient temperature above 20 m. The reason for this sudden change is that, compared with the detection range at the relative altitude of 15 m, the low-temperature area (vegetation covered area) is introduced in large quantities when the altitude is raised, which results in a larger attenuation of the overall temperature.
It can also be seen from Table 2 that the measurement height has great effects on the detection accuracy of potential leakage area. Figure 10 shows the relationship of measurement heights and d/L. It is clear that the values of d/L decreases with the measurement height. When the measurement height of infrared thermal imaging technology increases to 25 m, the values of d/L obtained from infrared images in the daytime and at night are similar. When the measurement height of infrared images is set as 15 m at night, the d/L has the maximum value of 0.029, indicating that in this case, the infrared thermal imaging technology can accurately identify hidden leakage area. As the relative height between the UAV and the detection area increases, the detection range obviously increases at the same time. The potential seepage area is relatively reduced and becomes harder to find. Therefore, it is necessary to find the optimal measurement height considering the detection accuracy and detection efficiency at the same time.

Effects of measurement heights on infrared detection accuracy.





